ENGR 100: Robotics Design Project
Introduction:
This project involves working in teams to design and build a robotic
wheelchair using LEGO Mindstorms Robotics Invention System to compete in an
obstacle course.
Problem Definition:
The objective of this project is to build a computer controlled robot
that can safely deliver an immobile person through an obstacle course. To
simulate real world situations, the robot must be able to climb a small ramp,
cross a street without getting hit by a car, turn corners, fight off aggressive
animals, climb stairs and free itself from a sandpit. Educational Goals: The
goals of this project are as follows:
- To provide students with hands on experience building a simple programmable robot.
- To demonstrate that engineering projects typically involve a multitude of skills and knowledge from many subject areas.
- To familiarize students with the design process.
- To introduce students to the basics of computer programming.
- To spark students' interest in Science and Technology.
References:
"LEGO MINDSOTRMS Robot, " Kundsen, Jonathan B. , 1st
edition, 1999, O’Reilly
http://www.crynwr.com/lego-robotics/
http://www.plazaearth.com/usr/gasperi/lego.htm#background
http://www.oreilly.com/catalog/lmstorms/resources/index.html
Obstacle Course:
The course is set up on a concrete floor as shown in Figure 1. The
outer wall consists of two 2 x 4's stacked on top of each other. A 3" tall
ramp is located immediately past the starting area, followed by a crosswalk
through two-way traffic. The next obstacle is a 90° turn and stairs. After the
stairs, the wheelchair can choose to go through the sand pit/ defenders or the
overpass. Each route will contribute same points if fully completed.
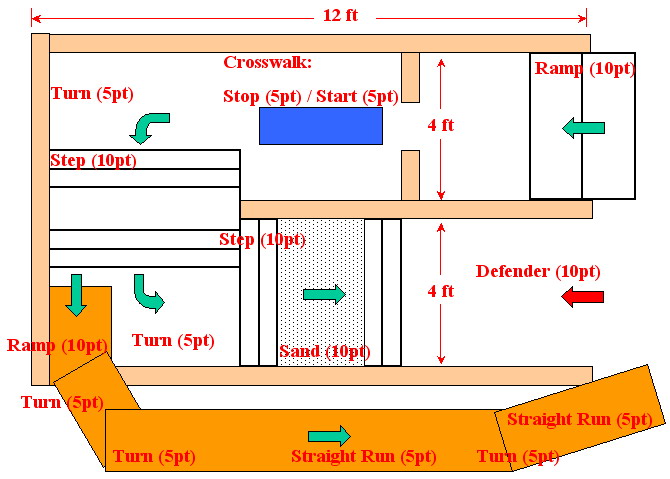
Figure 1. Obstacle Course and associated points for robot competition
Tasks to complete:
By using the Lego kit provides, your robot has to perform the following three different tasks and act as different roles.
·
·
First, the robot must perform as a regular wheelchair.
It must be able to safely transport a passenger (will be provided). Robots
whose passengers fall out will be disqualified.
·
·
Second, the robot must perform as a car,
which can move forward and backwards across a narrow passage.
·
·
Third, the robot must perform as an unfriendly animal, which tries to
stop the wheelchair. A defender. The robot can
use any movement to stop the competing robotic wheelchair.
You can build three different robots to perform
Wheelchair, Car, and Defender individually, or you can just build just one or
two robots to perform all three tasks, depending on your design.
However, you have to have three programs stored in
the RCX to perform as Wheelchair, Car, and Defender individually.
The details about
the three robots are as followings:
Robot 1 - Wheelchair
The wheelchair has to complete following tasks:
1. Climb over the ramp.
2. Stop at the cross walk (where the blue mat and cars are). Send out message 1 to stop the cars. Respond to message 2 to continue the run.
3. Make a 90° turn and climb over stairs.
4. At this point, you can choose to go through the overpass or the sand pit / defenders.
For overpass: Climb up the ramp. Stay on the bridge without falling. Go down the ramp and finish.
For sand pit / defenders: Make a 90° turn. Climb up stairs. Go through sand
pit. Go down stairs. Go pass defenders and finish.
Robot 2 - Car
The car goes back and forth along the full span of the passage (4ft)..
The car has to respond to message 1 to stop, but without stopping
over the cross walk (the blue mat).
Robot 3 - Defender Robot
The defender tries to stop the wheelchair by any means (no burning,
electric-shocking, or damaging of the lego parts). The defender ha to start
from the finish line, and can go around the course.
**Extra credits for using NQC program and
homemade sensors**
Constraints:
Size:
The maximum size of the robot must not exceed 12" by 12" by
12" at the start of the competition. After the start, there is no size constraint. All
robots will be carefully measured. Don't risk disqualification because your
robot is slightly over the limit!
Moreover, the robot cannot look over the walls of the structure.
There is no constraints on the materials you can use. Bring in
additional parts as you like.
Weight:
There are no restrictions on the weight of the robot.
Rules:
The following set of constraints must be adhered to during the
implementation of your respective designs. If you need further clarification, ask
before you implement!!!
1. You can not touch the robot after the run starts. The only interface you can use to start the run is the "run" button on your RCX.
2. Your robot cannot have anything "plug-ins", for example: power source, controller, etc.
3. You may alter any Lego parts; however, all destructive alternations and manufacturing must be approved by instructor. Hot-gluing is a "no-no".
4. You only have about 2 minutes between each run to do the alternations you need.
Scoring:
The group score of this project is earned by competition. During the competition, there will be five robots on the
obstacle courses at the same time (one wheelchair, two cars, and two
defenders). Robots will earn points for the obstacles they complete.
The final score will be awarded based on the following equation:
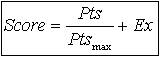
where:
Score = Final score (max 100%+ extra credit)
Pts = Total points your robot earned.
Ptsmax = Highest points earned in your class.
Ex = Extra credit for ingenious design